RoboTrade
Контакти
+380 (67) 106-52-87


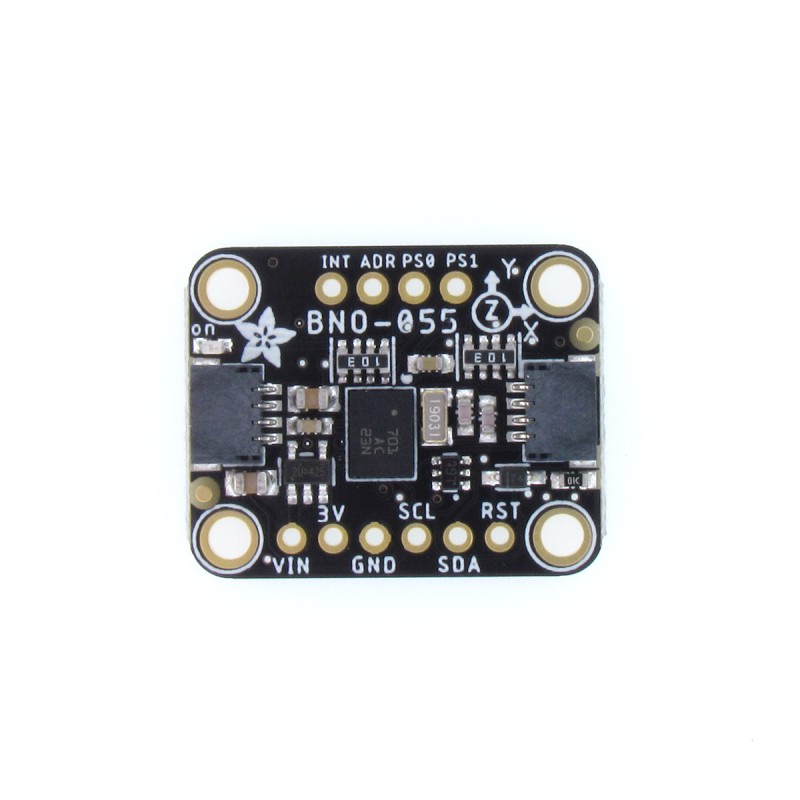
STEMMA QT 9-DOF Absolute Orientation IMU - модуль з 9-осьовим датчиком орієнтації BNO055
3 265 ₴
Показати оптові ціни- Готово до відправки
- Оптом і в роздріб
- Код: 1514348401
STEMMA QT 9-DOF Absolute Orientation IMU - модуль з 9-осьовим датчиком орієнтації BNO055Готово до відправки
3 265 ₴
+380 (67) 106-52-87
У компанії підключені електронні платежі. Тепер ви можете купити будь-який товар не покидаючи сайту.
опис
Модуль з 9-осьовим датчиком IMU BNO055, який поєднує в собі акселерометр, гіроскоп, магнітометр і систему обробки з ядром ARM Cortex-M0. Він має вбудовані алгоритми об’єднання датчиків, які поєднують вимірювання та генерують тривимірні вихідні дані орієнтації у формі кватерніонів, кутів Ейлера або векторів. Модуль дозволяє уникнути реалізації складних алгоритмів, необхідних для отримання орієнтації в просторі, і легко додати такий функціонал в проект. BNO055 дозволяє читати таку інформацію, як:
- Абсолютна орієнтація (кути Ейлера, 100 Гц) – дані орієнтації по трьох осях на основі сфери 360°
- Абсолютна орієнтація (кватерніони, 100 Гц) - дані кватерніонів
- Вектор кутової швидкості (100 Гц) - інформація про швидкість обертання в рад/с
- Вектор прискорення (100 Гц) – інформація про прискорення (гравітація + лінійний рух) у м/с^2
- Вектор напруженості магнітного поля (20 Гц) - інформація про напруженість магнітного поля (uT)
- Вектор лінійного прискорення (100 Гц) – інформація про лінійне прискорення по трьох осях (прискорення мінус гравітація) у м/с^2
- Gravity Vector (100 Гц) - інформація про гравітаційне прискорення (без будь-якого руху) у м/с^2
- Температура (1 Гц) - температура навколишнього середовища в градусах Цельсія
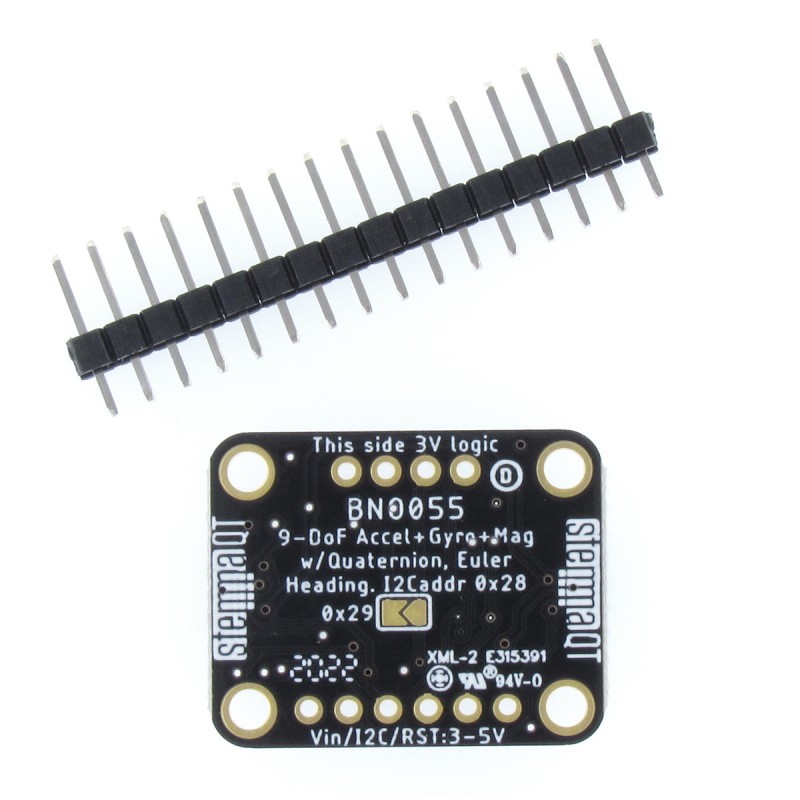
Модуль може працювати з системами з робочою напругою 3,3 В або 5 В, а зв'язок відбувається через інтерфейс I2C (роз'єм STEMMA QT). Повна документація з прикладами доступна на сторінці продукту.
Властивості
- Виведення даних у вигляді кватерніонів, кутів Ейлера, вектора обертання
- 3 датчика в одному пристрої: 16-бітний триосьовий гіроскоп, 14-бітний триосьовий акселерометр і магнітний датчик
- Інтелектуальне керування живленням: звичайний режим, доступне низьке енергоспоживання
- Робоча температура: від -40°C до 85°C
- Інтерфейс: I2C
- Напруга: 3,3 В або 5 В
- З'єднувач STEMMA QT
В комплекті
- STEMMA QT 9-DOF модуль IMU абсолютної орієнтації
- Прямий 16-контактний роз'єм Goldpin
Характеристики
| Основні атрибути | |
|---|---|
| Виробник | ARM |
| Користувальницькі характеристики | |
| Інтерфейс | I2C |
| Напруга живлення | 3,3 - 5 В |
| Тип датчика | Акселерометр, гіроскоп і магнітометр |
| Тип модуля | 9DoF |
Інформація для замовлення
- Ціна: 3 265 ₴