





TB67S249FTG - Драйвер крокового двигуна 47 В / 4,5 А - Pololu 2973
1 331 ₴
Показати оптові ціни- В наявності
- Оптом і в роздріб
- Код: 2332314400
Опис товару: TB67S249FTG - Драйвер крокового двигуна 47 В / 4,5 А - Pololu 2973
Система дозволяє керувати кроковим двигуном за допомогою пристрою, за допомогою якого можналогічні станитаких як Arduino, STM32Discovery, Raspberry Pi або будь-який інший мікроконтролер. Модуль Pololu дужепростий у використанні. Передній фронт кожного імпульсу на виводі CLK (STEP) відповідає одному кроку. Напрямок вибирається шляхом надання виходу CW / CCW (DIR) відповідного стану (наприклад, низький рівень - обертання за годинниковою стрілкою, високий - проти). У контролері також є можливість вибору роздільної здатності роботи двигуна.
Підключення блоку управління
Для керування біполярним кроковим двигуном підключіть систему, як показано на наступному малюнку.
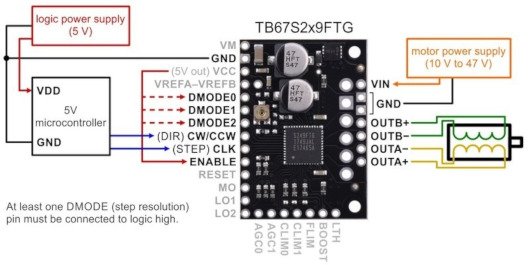
Мінімальна схема підключення мікроконтролера до TB67S2x9FTG.
Для роботи контролера потрібна напруга живлення від 10 В до 47 В, яка подається на виводи VIN і GND.
Електроживлення блоку управління
Напруга 5 В необхідна для живлення логічної частини модуля, яку слід підключити до виводу VDD. Напруга живлення двигуна в діапазоні від 10 В до 47 В подається на вивід VIN.
Обережно. Підключення та відключення двигуна при увімкненому блоці керування може призвести до пошкодження системи. |
Роздільна здатність і розмір кроку
Розмір кроку вибирається за допомогою входів DMODE0, DMODE1, DMODE2. Можливі налаштування наведені в наступній таблиці. Входи MS1, MS2 і MS3 мають внутрішній підтягуючий резистор (100 кОм).
| MS1 | MS2 | MS3 | Резолюція |
| низький | низький | низький | Режим очікування |
| низький | низький | високий | Повний крок |
| низький | високий | низький | некругла півсходинка ("а") |
| низький | високий | високий | 1/4 кроку |
| високий | низький | низький | круговий напівкрок ("b") |
| високий | низький | високий | Крок 1/8 |
| високий | високий | низький | Крок 1/16 |
| високий | високий | високий | Крок 1/32 |
Управління мікросхемою TB67S249FTG
Передній фронт кожного імпульсу на виводі CLK (STEP) відповідає одному кроку. Напрямок вибирається за допомогою відповідного стану виводу CW / CCW (DIR) (наприклад, низький рівень - обертання за годинниковою стрілкою, високий рівень - проти). Якщо двигун повинен обертатися тільки в одному напрямку, вивід DIR можна не підключати.
Коли вивід RESET стає високим, контролер скидає свій стан у таблиці перетворювача, який він приводить до початкового значення 45°. Це відповідає 100 % обмеження струму на обох котушках в режимі повного кроку і в режимі некругового напівкроку. Вивід RESET не вимикає виходи двигуна, контролер продовжує подавати струм на двигун, але не подає жодної інформації на вихід CLK
TB67S2x9FTG може виявити кілька станів помилки, про які він повідомляє, коли один або обидва виводи LO знаходяться в низькому стані. Виробник включив в документацію таблицю комбінацій помилок на виводах LO1 і LO2.
Детальний опис окремих штифтів можна знайти на сайті виробника.
Корисні посилання
|
| Grzegorz P. | |
| отлично | |
| Надійний :) | |
| Основні | |
|---|---|
| Виробник | Arduino |
- Ціна: 1 331 ₴