



Лінійний датчик Холла DFRobot Gravity DFR1132 для вимірювання магнітного поля, 3,3-5 В, ±1200 Гс, сумісний з Arduino, Micro:bit,
265 ₴
243,80 ₴
Показати оптові ціниМінімальна сума замовлення на сайті — 300 ₴
- Готово до відправки
- Оптом і в роздріб
- Код: BotDFR-25293
Опис продукту: DFRobot Gravity - лінійний / аналоговий датчик Холла магнітного поля - DFR1132
Сенсорний модуль DFRobot Gravity Hall призначений для вимірювання та моніторингуНапруженість магнітного полярозроблений. Він оснащений 3 аналоговими контактами та світлодіодним дисплеєм для відображення виявленого магнітного поля. Він прийде з3,3 В до 5 Вматеріали,його струм живлення коливається від 4,2 мА до 8 мА. Він має низький рівень шуму, тому можливі лише мінімальні перешкоди. Його можна використовувати з такими контролерами, якArduino, Micro:bitіUNIHAKERі тому підходить, наприклад, для визначення положення та швидкості в робототехніці або системах безпеки.
Kсумісний з ArduinoВиробник підготував детальну інструкцію користувача, яка містить опис проектів з використанням датчика та зразок програмного коду.
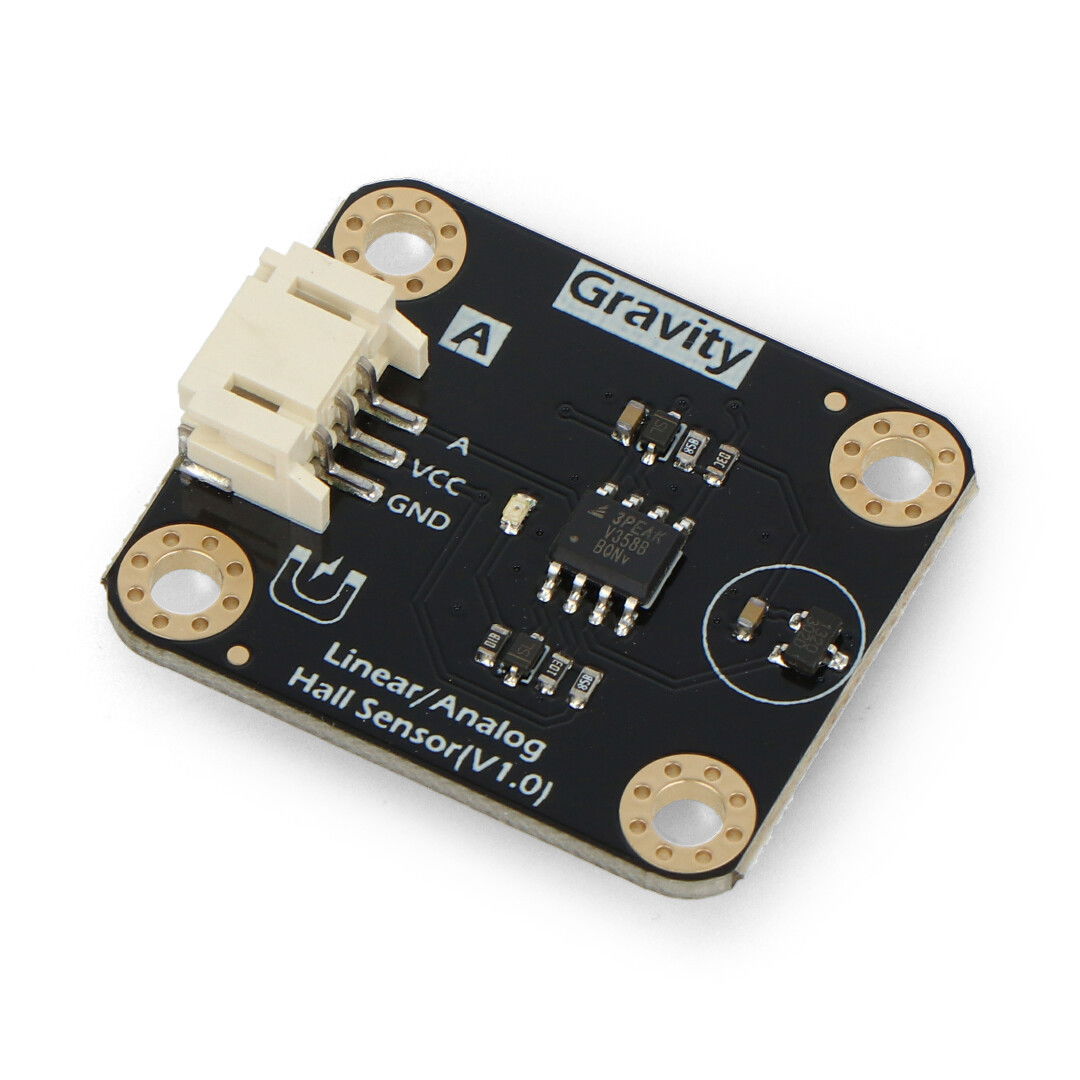
DFRobot Gravity - лінійний / аналоговий датчик Холла магнітного поля - DFR1132.
Гравітаційний модуль DFRobot з датчиком Холла.
Основні характеристики датчика DFRobot Gravity DFR1132
- Біполярний датчик: виявляє магнітні поля на відстані< 1 cm (abhängig von Magnetfeldstärke und -richtung)
- Низький рівень шуму: інтегральна схема має низький рівень шуму для стабільних і точних вимірювань
- Один вихідний джерело живлення: вихідний сигнал стабільний і нечутливий до коливань напруги
- Вбудований світлодіод: загоряється при виявленні магнітного поля, користувач може швидко перевірити роботу пристрою
- Широка сумісність:легке підключення до таких мікроконтролерів, як Arduino, Micro:bit і UNIHIKER, що забезпечує широкий спектр застосувань
- Проста експлуатація: забезпечує швидке та безпроблемне встановлення та робить датчик зручним навіть для новачків
Підключення датчика Холла
Датчик працює з мікроконтролером, оснащеним аналоговими входами (Arduino, Micro:bit, UNIHIKER). Щоб почати роботу, підключіть:
- VCCдо джерела живлення 3,3 В або 5 В (залежно від потреб датчика)
- GNDдо заземлення схеми
- Aдо аналогового контакту мікроконтролера
Після підключення датчик генерує аналоговий сигнал, пропорційний силі виявленого магнітного поля. Це дає змогу точно контролювати зміни поля та обробляти результати в електронних проектах.
 Сумісний з Arduino, Micro:bit і UNIHAKER.
Сумісний з Arduino, Micro:bit і UNIHAKER.
Робота датчика сили тяжіння
Удосконалена плата DFRobot Gravity DFR1132 має в основі схеми, які перетворюють силу магнітної індукції безпосередньо у вихідну напругу. Завдякивисока точністьДатчик можна використовувати для багатьох рішень, які вимагають точностіВиявлення магнітного полявимагати. До них належать проекти промислового контролю, науково-дослідницька робота, системи безпеки та різноманітні проекти, що стосуються електронних пристроїв. Датчик реагує на магнітні поля, коли:
- південний полюсмагніт наближається до поверхні виявлення; у цьому випадку магнітне поле стає сильнішим, а вихідна напруга піднімається вище середньої точки і поступово збільшується
- Північний полюснаближається до чутливої поверхні, тоді вихідна напруга падає нижче середньої точки і поступово зменшується.
Технічні дані DFRobot Gravity DFR1132
- Напруга живлення: від 3,3 В до 5 В
- Струм живлення: від 4,2 до 8 мА
- Діапазон магнітного поля: ± 1200 Гс
- LED-дисплей: так
- Відстань виявлення: <1 см (конкретна відстань виявлення залежить від напруженості та напрямку магнітного поля)
- Тип даних: аналоговий
- Підключення: 3 контакти з відстанню 2 мм
- Площа магнітного полюса:
- micro:bit і Arduino (S-Pol): від 520 до 1023
- micro:bit і Arduino (N-полюс): від 0 до 500
- UNIHIKER (S-полюс): від 2068 до 4095
- UNIHIKER (N-полюс): від 0 до 2028
- Розмір пластини: 27 х 32 мм
- Вага: 3,5 г
Вміст упаковки
- 1 x Гравітаційний лінійний/аналоговий магнітний датчик Холла DFRobot DFR1132
- 1 х з'єднувальний кабель (30 см)

Вміст набору.
| Основні атрибути | |
|---|---|
| Виробник | Arduino |
- Ціна: 243,80 ₴