





TB67S249FTG - драйвер шагового двигателя 47 В / 4,5 А - Pololu 2973
1 331 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: 2332314400
Описание продукта: TB67S249FTG - драйвер шагового двигателя 47 В / 4,5 А - Pololu 2973
Система позволяет управлять шаговым двигателем с помощью устройства, с помощью которого можнологические состояниятаких как Arduino, STM32Discovery, Raspberry Pi или любой другой микроконтроллер. Модуль Pololu является оченьпрост в обращении. Восходящий фронт каждого импульса на выводе CLK (STEP) соответствует одному шагу. Направление выбирается путем придания выходу CW / CCW (DIR) соответствующего состояния (например, низкое состояние - вращение по часовой стрелке, высокое состояние - реверс). В регуляторе также имеется возможность выбора разрешения работы двигателя.
Подключение блока управления
Для управления биполярным шаговым двигателем подключите систему, как показано на следующем рисунке.
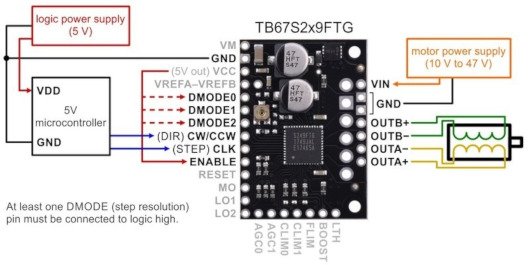
Минимальная схема подключения микроконтроллера к TB67S2x9FTG.
Контроллеру требуется напряжение питания от 10 В до 47 В, которое подключается к контактам VIN и GND.
Питание блока управления
Напряжение 5 В необходимо для подачи питания на логическую часть модуля, которая должна быть подключена к выводу VDD. Напряжение питания двигателя в диапазоне от 10 В до 47 В подается на вывод VIN.
Предупреждение. Подключение и отключение двигателя при включенном блоке управления может повредить систему. |
Разрешение и размер шага
Размер шага выбирается входами DMODE0, DMODE1, DMODE2. Возможные настройки приведены в следующей таблице. Входы MS1, MS2 и MS3 имеют внутренний подтягивающий резистор (100 кОм).
| MS1 | MS2 | MS3 | разрешение |
| низкий | низкий | низкий | Режим ожидания |
| низкий | низкий | высокая | Полный шаг |
| низкий | высокая | низкий | некруглый полушаг ("a") |
| низкий | высокая | высокая | 1/4 шага |
| высокая | низкий | низкий | круговой полушаг ("b") |
| высокая | низкий | высокая | 1/8 шага |
| высокая | высокая | низкий | шаг 1/16 |
| высокая | высокая | высокая | 1/32 шага |
Управление микросхемой TB67S249FTG
Восходящий фронт каждого импульса на выводе CLK (STEP) соответствует одному шагу. Направление выбирается путем подачи на вывод CW / CCW (DIR) соответствующего состояния (например, низкое состояние - вращение по часовой стрелке, высокое состояние - реверс). Если двигатель должен вращаться только в одном направлении, вывод DIR может оставаться неподключенным.
Когда контакт RESET становится высоким, контроллер сбрасывает свое состояние в таблице преобразователя, которое он приводит к начальному значению 45°. Это соответствует 100 % ограничения тока на обеих катушках в режиме полного шага и в режиме некруглого полушага. Контакт RESET не отключает выходы двигателя, контроллер продолжает подавать ток на двигатель, но не выдает никакой информации на выход CLK
TB67S2x9FTG может обнаружить несколько состояний ошибки, о которых он сообщает, которые вызывают низкий уровень на одном или обоих выводах LO. Производитель включил в документацию таблицу комбинаций ошибок на выводах LO1 и LO2.
Подробное описание отдельных контактов можно найти на сайте производителя.
Полезные ссылки
|
| Grzegorz P. | |
| отлично | |
| Надежный :) | |
| Основные | |
|---|---|
| Производитель | Arduino |
- Цена: 1 331 ₴