





Драйвер шагового двигателя Pololu 36v4, 50 В / 6 А, управление через SPI, защита от перегрева, размеры 34x30x10 мм, 9 г.
2 197 ₴
Показать оптовые цены- Готово к отправке
- Оптом и в розницу
- Код: 3270779660
Описание продукта: Pololu 36v4 - мощный 50В / 6А драйвер шагового двигателя
Тот, что наDRV8711-Системный драйвер шагового двигателя позволяет управлять биполярным шаговым двигателем. Драйвер позволяет управлять двигателем с помощью простого интерфейса шага и направления, но сначала он должен управляться черезинтерфейс SPIдолжны быть сконфигурированы. Это означает, что модуль управления должен иметь возможность работать в режиме мастера шины SPI (например, Arduino ) и должен быть подключен к контактам SDATi, SCLK и SCS. Кроме того, контроллер имеет множество защитных функций, таких как защита от обратного напряжения, слишком низкого напряжения. Контроллер оснащенинтерфейс ШИМс помощью которого можно управлять двумя двигателями постоянного тока.
Сложный драйвер шагового двигателя - Pololu 36v4.
Выходы модуля Pololu 36v4- Мощный драйвер шагового двигателя 50 В / 6 А
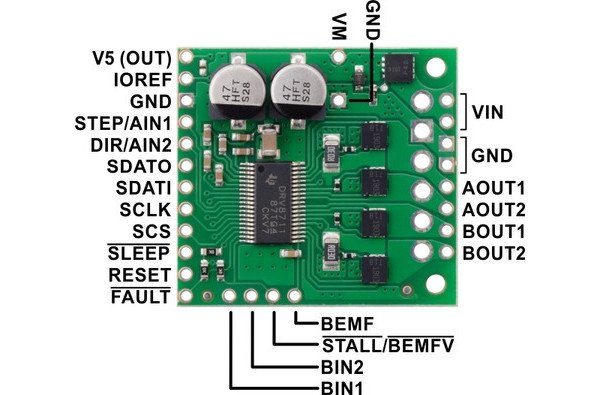
| Жесткий | описание |
|---|---|
| Номер шасси | Источник питания шагового двигателя, от 8 до 50 В (защита от обратной полярности до 40 В) |
| VM | Контакт, обеспечивающий доступ к источнику питания шагового двигателя. |
| Масса | Масса системы. |
OFF1 OFF2 | Выходы двигателя: однофазные концы катушки. |
БАТТЛ1 БАТТЛ2 | Выходы двигателя: концы катушки фазы B |
V5 (AUS) | Регулируемый выход 5 В Обеспечивает доступ к напряжению от внутреннего регулятора DRV8711. Регулятор может подавать максимум 10 мА. |
IOREF | Все сигнальные выходы контроллера (кроме BEMF) являются типами с открытым коллектором, которые подтягиваются к выводу IOREF, поэтому на них должно подаваться напряжение, соответствующее логическому напряжению модуля управления (например, 3,3 В, если модуль управления работает с логическим напряжением 3,3 В). Если контроллер используется с модулем, который работает с напряжением 5 В, его можно подключить к соседнему выводу 5 В (OUT). |
STEP / AIN1 | Импульс, поданный на вывод STEP, вызывает шаг двигателя, движение двигателя также может управляться через интерфейс SPI, поэтому использование этого вывода необязательно. В режиме работы ШИМ он действует как AIN1 вместо STEP и напрямую управляет состоянием выхода AOUT1. |
DIR/AIN2 | Вход, определяющий направление вращения шагового двигателя. Направлением можно управлять и через интерфейс SPI, поэтому использование этого вывода необязательно.В режиме работы ШИМ он действует как AIN1 вместо STEP и непосредственно управляет состоянием выхода AOUT1. |
SDATO | Контакт, также известный как MISO, используется для отправки данных в интерфейсе SPI. |
SDATI | Контакт, также известный как MOSI, используется для приема данных в интерфейсе SPI. |
SCLK | Тактовая линия SPI. |
СКС | Адресация системы SPI. |
СОН | По умолчанию вывод находится в низком состоянии, что вызывает спящий режим, в котором управление двигателем выключено и все аналоговые схемы находятся в режиме низкого энергопотребления, в то время как цифровые схемы остаются активными, что позволяет получить доступ к драйверу через последовательный интерфейс. Для запуска устройства вывод должен находиться в высоком состоянии. |
СБРОС | Сброс системы, активируется в состоянии High. Функция не работает, если устройство находится в спящем режиме. |
ОШИБКА | По умолчанию вывод находится на высоком уровне. Переходит в низкий уровень при возникновении ошибки. |
BIN1 | В режиме ШИМ он непосредственно управляет состоянием выхода BOUT1. |
БИН2 | В режиме работы ШИМ он непосредственно управляет состоянием выхода BOUT2. |
СТАЛЬ / BEMFV | Выход с открытым коллектором, напрямую подключенный к контакту IOREF. Выход переходит в низкий уровень при обнаружении остановки двигателя. |
BEMF | Аналоговый выход ЭДС. Выходной сигнал на этом выводе может быть использован для реализации более сложных алгоритмов и обнаружения остановки двигателя. |
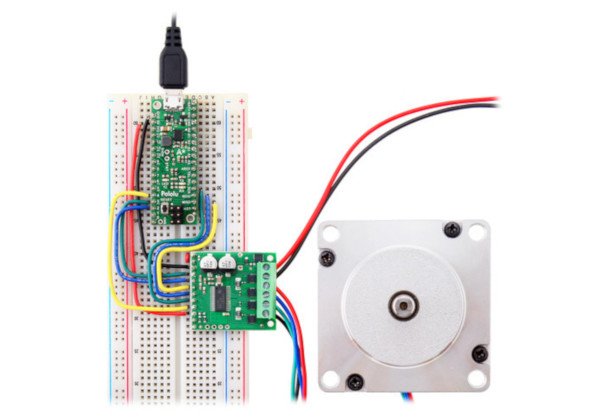
Схема подключения Pololu 36v4 - мощный 50В / 6А драйвер шагового двигателя
Хотя с Pololu 36v4 вы можете управлять двигателем с помощью простого интерфейса шага и направления,сначала его необходимо сконфигурировать через шину SPIчто означает, что модуль управления должен быть способен работать в режиме ведущего устройства интерфейса SPI и взаимодействовать сSDATiдля подключения.SCLK и SCS. При использовании драйвера контакты SDATO и FAULT не требуются.
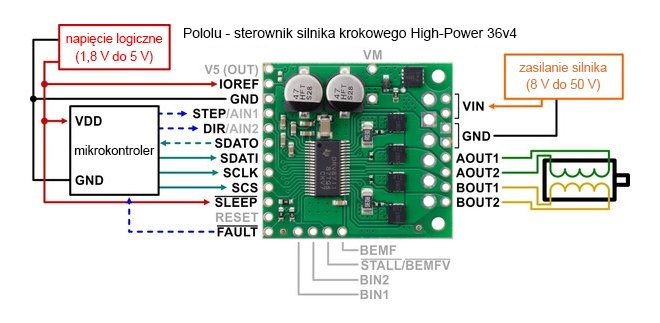
Пример схемы подключения контроллера Pololu 36v4 к микроконтроллеру.
Контроллер Pololu 36v4 оснащен внутренним регулятором 5 В, который можно использовать для подачи питания на вывод IOREF, когда плата используется с микроконтроллером, работающим с логическим напряжением 5 В. Для этого можно использовать прилагаемую перемычку или припаять площадки на плате.
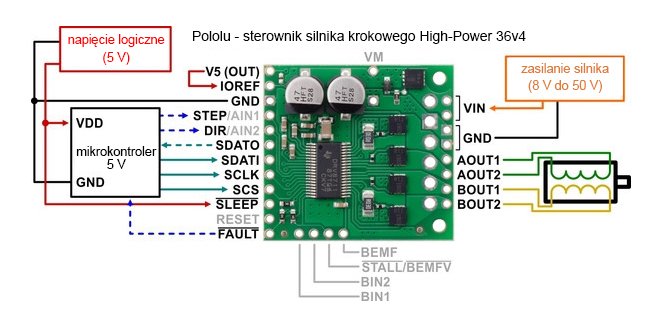
На плате есть паяльные площадки, которые можно использовать для постоянного подключения линий 5 В (OUT) и IOREF.
Предупреждение. Подключение и отключение двигателя при включенном блоке управления может повредить систему. |
Библиотека Arduino - Pololu 36v4 - мощный 50V/6A драйвер шагового двигателя
Производитель предоставляет готовую библиотеку с примерами скетчей для плат Arduino на GitHub, которая обеспечивает базовые функции для настройки и работы контроллера.
Подключение контроллера к Arduino-совместимому модулю .
Технические характеристики Pololu 36v4 - мощный драйвер шагового двигателя с 50 В / 6 A
- Напряжение питания двигателя: от 8 В до 50 В
- Ток: макс. на катушку 4 А (с охлаждением до 6 А)
- Напряжение питания логической части: 1,8 В, 3,3 В и 5 В
- Интерфейс:
- СОН
- Простой интерфейс управления направлением и шагом
- ШИМ-интерфейс для управления двигателями постоянного тока
- Работайте в 9 различных режимах:
- полный шаг
- полшага
- 1/4 шага
- 1/8 шага
- шаг 1/16
- 1/32 шага
- 1/64 Шаг
- 1/128 Шаг
- 1/256 Шаг
- Защита от:
- Блокирующее напряжение
- Слишком низкое напряжение
- Слишком большой ток
- Перегрев
- Размеры: 34 x 30 x 10 мм
- Вес: 9 г
Полезные ссылки
|
| Paulina | |
| отлично | |
| Все было отлично, быстрая доставка. Могу рекомендовать.????️ | |
| Gert | |
| отлично | |
| Продукция Pololu хорошо сделана и отлично работает... | |
| Основные атрибуты | |
|---|---|
| Материал | Сталь |
- Цена: 2 197 ₴