




Набор для сборки балансирующего робота Balboa 32U4 с микроконтроллером ATmega 32u4, IMU, 2 канала управления, совместимость с
8 184 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: 3849294171
Описание
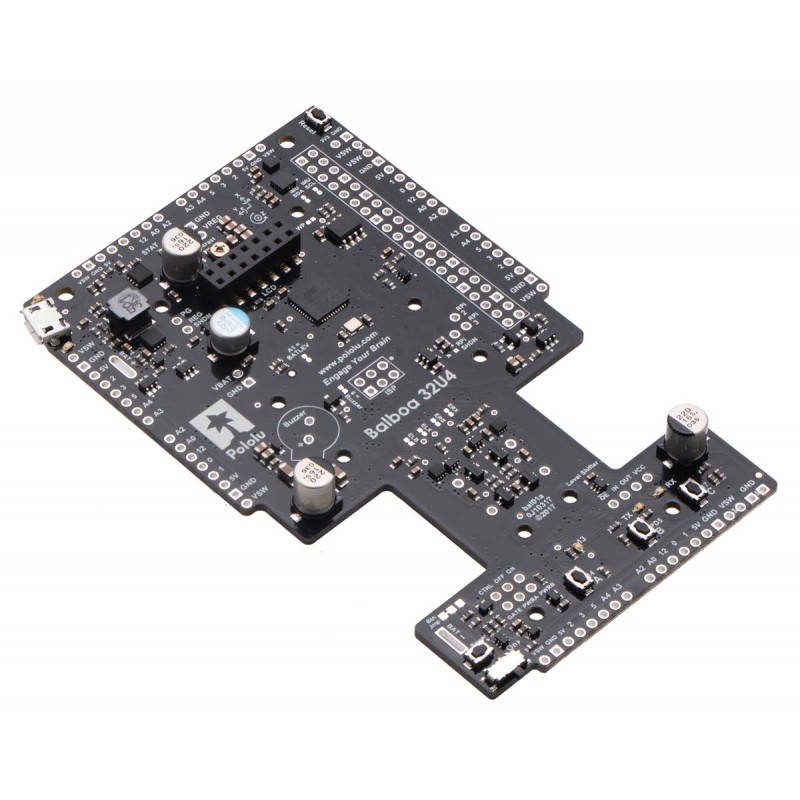
Balboa 32U4 — это набор компонентов, необходимых для сборки балансирующего робота. Он основан на микроконтроллере ATmega 32u4, который можно программировать в среде Arduino IDE. Плата также включает в себя двойной H-мост для управления двигателем, квадратурные энкодеры и измерительный блок IMU (3-осевой акселерометр, гироскоп и магнитометр). Благодаря вышеперечисленным элементам можно создать робота, балансирующего на двух колесах. Соответствующий разъем позволяет осуществить интеграцию с мини-компьютером Raspberry PI.
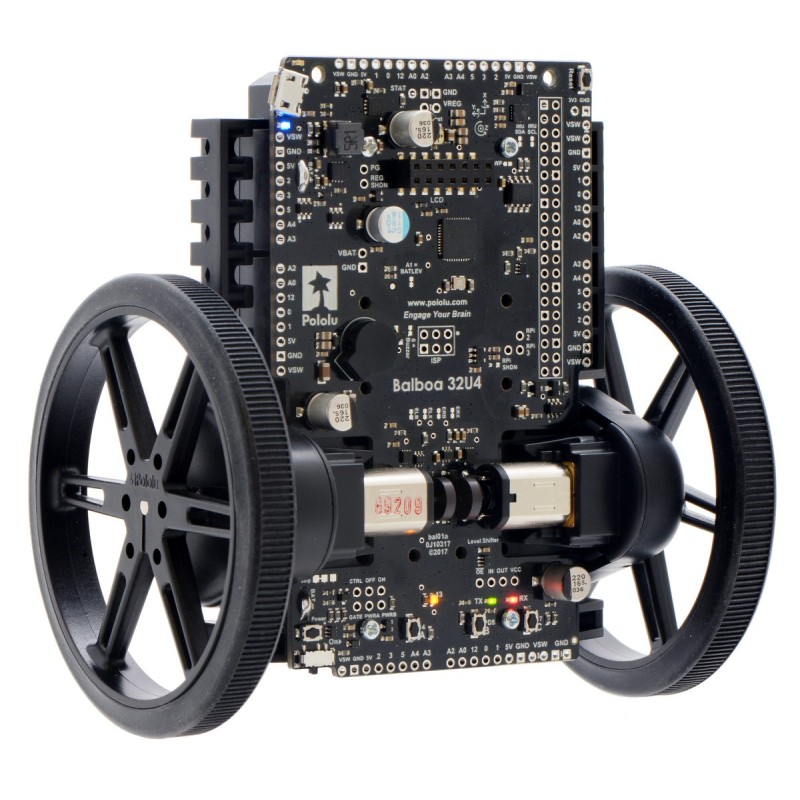
В комплект не входят двигатели и соответствующие колеса, их необходимо приобретать отдельно. Рекомендуются следующие двигатели:

- Двигатель Pololu HPCB с коробкой передач 30:1 6V и двухсторонним валом
- Двигатель Pololu HPCB с коробкой передач 50:1 6V и двухсторонним валом
- Двигатель Pololu HPCB с коробкой передач 75:1 6V и двухсторонним валом
Рекомендуемые колеса — Pololu 80x10 мм, вы также можете использовать колеса большего размера Pololu 90x10 мм.

Видеоматериал, демонстрирующий возможности набора:
Характеристики
- Набор элементов для сборки балластирующего робота
- Плата Balboa 32U4 с:
- Микроконтроллер Atmega 32U4
- Двухканальный контроллер двигателя постоянного тока
- Квадратурные энкодеры
- Инерциальный датчик IMU (3-осевой акселерометр, гироскоп и магнитометр)
- Разъем для интеграции с компьютером Raspberry Pi
- светодиоды
- Зуммер
- Понижающий стабилизатор 2А/5В
Включено
- Плата Balboa с микроконтроллером Atmega 32u4
- Корпус с батарейным отсеком
- 2 опоры двигателя
- 2 крышки редуктора
- 6 шарикоподшипников 683
- 2 оси 3 миллиметра
- Различные типы передач
- Набор винтов
- Пластины отсека для батареек
- Зуммер
- 2 магнитных диска для энкодеров
- Цена: 8 184 ₴