
Плата драйвера шагового двигателя DRV8834 для низковольтных двигателей, TI, 2,5-10,8 В, до 2 А, 6 разрешений шага, защита от
958 ₴
Показать оптовые цены- Готово к отправке
- Оптом и в розницу
- Код: 324706572
DRV8834 Плата драйвера шагового двигателя низкого напряжения
Данный продукт представляет собой несущую плату или коммутационную плату для низковольтного драйвера шагового двигателя DRV8834 компании TI; Поэтому мы рекомендуем внимательно прочитать техническое описание DRV8834 (2 МБ pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (см.Соображения относительно рассеивания мощностираздел ниже для получения дополнительной информации). Вот некоторые из основных особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных разрешений шага: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемый контроль тока позволяет вам устанавливать максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжение выше номинального напряжения вашего шагового двигателя для достижения более высоких скоростей шагов.
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный режим затухания тока (быстрое затухание или медленное затухание)
- Диапазон напряжения питания 2,5-10,8 В
- Встроенный регулятор (внешний источник логического напряжения не требуется)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Тепловое отключение при перегреве, отключение при перегрузке по току и блокировка при пониженном напряжении
- Защита от замыкания на землю, замыкания на питание и короткого замыкания нагрузки
- 4-слойная печатная плата из меди плотностью 2 унции для улучшенного рассеивания тепла
- Открытая паяемая заземляющая площадка под ИС драйвера в нижней части печатной платы
- Размер модуля, расположение выводов и интерфейс во многих отношениях соответствуют нашим держателям драйверов шаговых двигателей A4988 (более подробную информацию см. в нижней части этой страницы).
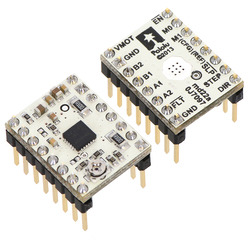
Данное изделие поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8834, установленную, как показано на рисунке изделия.
Для альтернативных, совместимых по выводам драйверов шаговых двигателей, работающих с более высокими напряжениями питания двигателя, рассмотрите наши носители DRV8825, DRV8824 и A4988 (также доступны в версии Black Edition и с регуляторами напряжения).
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Более подробную информацию можно найти в разделе часто задаваемых вопросов. Униполярные двигатели с пятью выводамине можетиспользоваться с этим драйвером.
Включенное оборудование
Плата драйвера шагового двигателя DRV8834 поставляется с одним 1,16-контактным отрывным 0,1-дюймовым штыревым разъемом. Разъемы можно припаять для использования с беспаечными макетными платами или 0,1-дюймовыми гнездовыми разъемами. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате.
|
|
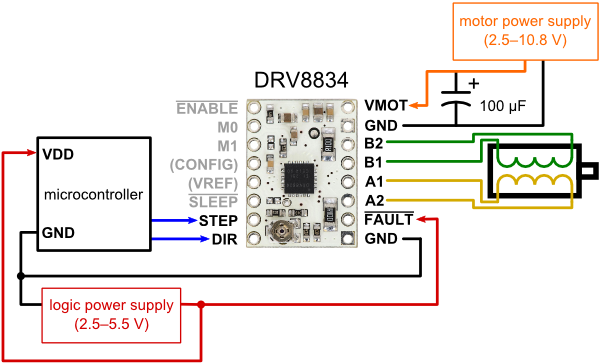
Использование драйвера
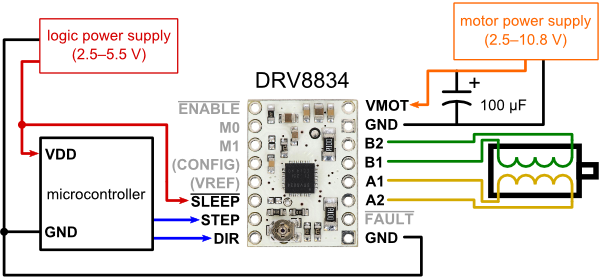 |
| Минимальная схема подключения микроконтроллера к плате драйвера шагового двигателя DRV8834 (режим 1/4 шага). |
|---|
Силовые соединения
Драйверу необходимо напряжение питания двигателя 2,5–10,8 В, подключенное через VMOT и GND. Этот источник питания должен иметь соответствующие развязывающие конденсаторы вблизи платы и должен быть способен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение:В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании силовых проводов длиной более нескольких дюймов. При правильных условиях эти скачки напряжения могут превысить максимально допустимое напряжение 11,8 В для DRV8834 и привести к необратимому повреждению платы, даже если напряжение питания двигателя составляет всего 9 В. Один из способов защиты драйвера от таких скачков напряжения — установить большой (не менее 47 мкФ) электролитический конденсатор параллельно цепи питания двигателя (VMOT) и заземлению где-нибудь поблизости от платы.
Соединения двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться DRV8834, если они правильно подключены; В ответе на часто задаваемые вопросы подробно объясняется правильная проводка.
Предупреждение:Подключение или отключение шагового двигателя при включенном драйвере может привести к выходу драйвера из строя. (В более общем смысле, переподключение чего-либо, когда оно находится под напряжением, — это напрашиваться на неприятности.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая применяется к полным шагам. Микрошаговый драйвер, такой как DRV8834, обеспечивает более высокое разрешение за счет промежуточных положений шагов, которые достигаются путем подачи на катушки тока промежуточных уровней. Например, работа двигателя в четвертьшаговом режиме даст двигателю с частотой 200 шагов на оборот 800 микрошагов на оборот, используя четыре различных уровня тока.
Входы селектора разрешения (размера шага) (M0 и M1) позволяют выбирать из шести разрешений шага в соответствии с таблицей ниже. M0 по умолчанию является плавающим, а M1 имеет внутренний 200 кОм. подтягивающий резистор, поэтому если оставить эти два контакта выбора микрошага отключенными, то получится режим 1/4 шага. Для корректной работы микрошаговых режимов ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут поддерживаться правильно, и двигатель будет пропускать микрошаги.
| М0 | М1 | Разрешение микрошага |
|---|---|---|
| Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Полушаг |
| Плавающий | Низкий | 1/4 шага |
| Низкий | Высокий | 1/8 шага |
| Высокий | Высокий | 1/16 шага |
| Плавающий | Высокий | 1/32 шага |
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Оба этих входа по умолчанию подключены к низкому уровню через внутренний резистор 200 кОм. подтягивающие резисторы. Если вам нужно вращение только в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет два различных входа для управления состояниями питания:СПАТЬиЭНБЛ. Подробную информацию об этих режимах питания см. в техническом описании. Обратите внимание, что водитель тянетСПАТЬнизкий уровень через внутренний резистор 500 кОм? резистор стягивающий вниз, и он тянетЭНБЛнизкий уровень через внутренний резистор 200 кОм? подтягивающий резистор. Значение по умолчаниюСПАТЬсостояние не позволяет водителю управлять автомобилем; Этот вывод должен быть высоким, чтобы включить драйвер (его можно подключить напрямую к логическому «высокому» напряжению от 2,5 до 5,5 В или им можно динамически управлять, подключив его к цифровому выходу микроконтроллера). Состояние по умолчаниюЭНБЛконтакт предназначен для включения драйвера, поэтому этот контакт можно оставить неподключенным.
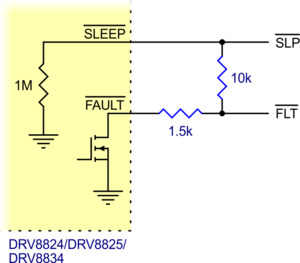 |
| Схема контактов nSLEEP и nFAULT на носителях DRV8824/DRV8825/DRV8834. |
|---|
DRV8834 также имеетВИНАвыход, который переходит на низкий уровень всякий раз, когда полевые транзисторы H-моста отключаются в результате срабатывания защиты от перегрузки по току или теплового отключения, или когда блокировка от пониженного напряжения отключает микросхему. Несущая плата подключает этот штифт кСПАТЬконтакт через резистор 10 кОм, который действует какВИНАподтянуть qwertyСПАТЬснаружи удерживается высоко, поэтому нет необходимости во внешней подтяжкеВИНАприколоть. Обратите внимание, что в комплект поставки входит защитный резистор сопротивлением 1,5 кОм, включенный последовательно сВИНАштырь, который позволяет безопасно подключать этот штырь напрямую к логическому источнику напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по штырькам носителя A4988. В такой системе резистор 10 кОм междуСПАТЬиВИНАзатем будет действовать как подтягивание дляСПАТЬ, что делает носитель DRV8834 более прямой заменой A4988 в таких системах (A4988 имеет внутренний подтягивающий резистор на своемСПАТЬприколоть). Чтобы не допустить, чтобы неисправности привели к падениюСПАТЬштифт, любой внешний подтягивающий резистор, который вы добавляете кСПАТЬВходной контакт не должен превышать 4,7 кОм.
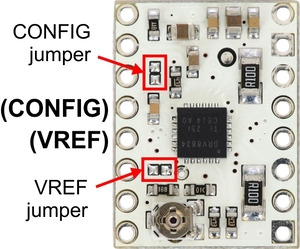
Дополнительные штыревые перемычки
Вывод CONFIG на DRV8834 можно использовать для выбора между режимом индексатора по умолчанию, который предназначен для управления шаговыми двигателями, и режимом альтернативной фазы/включения, который можно использовать для управления двумя щеточными двигателями постоянного тока. По умолчанию он недоступен (чтобы избежать конфликтов при использовании носителя DRV8834 в качестве замены для других наших носителей драйверов шаговых двигателей), но его можно подключить к выводу с маркировкой “(CFG)” путем замыкания перемычки поверхностного монтажа, показанной на рисунке ниже. Вторую перемычку можно подключить, чтобы сделать опорное напряжение ограничения тока доступным на выводе с маркировкой “(REF)”.
 |
Ограничение тока
Для достижения высокой скорости шага питание двигателя обычно выше, чем было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при 5 Ом. сопротивление катушки, что указывает на максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 9 В позволит увеличить частоту шагов, но ток должен быть активно ограничен до значения менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8834 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вам захочется установить предел тока драйвера на уровне или ниже номинального тока вашего шагового двигателя. Один из способов установки ограничения тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет составлять 0,7 от предельного тока (поскольку обе катушки всегда включены и ограничены приблизительно 70% от установленного предельного тока в полношаговом режиме).
Другой способ установить ограничение тока — измерить напряжение на “ref” штифт и для расчета результирующего предела тока (резисторы считывания тока0,100 ?). Напряжение опорного контакта доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы, или через контакт с маркировкой “(REF)” если подключена соответствующая перемычка для поверхностного монтажа (см. выше). Предельный ток соотносится с опорным напряжением следующим образом:
Предел тока = VREF × 2
Так, например, если у вас есть шаговый двигатель, рассчитанный на ток 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.
Примечание:Ток катушки может сильно отличаться от тока источника питания, поэтому вам следуетнетиспользуйте ток, измеренный на источнике питания, для установки предела тока. Подходящим местом для установки измерителя тока является последовательное подключение к одной из катушек шагового двигателя.
Соображения относительно рассеивания мощности
Микросхема драйвера DRV8834 имеет максимальный номинальный постоянный ток 1,5 А на катушку, и в наших тестах эта несущая плата была способна подавать номинальный ток в течение многих минут без необходимости дополнительного охлаждения. DRV8834 может поддерживать пиковые токи до 2,2 А на катушку, но его защита от перегрузки по току может сработать при токе всего лишь 2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать охлаждение микросхемы. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более 1,5 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт можно получитьгорячийдостаточно, чтобы обжечь вас задолго до того, как чип перегреется. Будьте осторожны при обращении с данным изделием и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, как правило, не обеспечивает точного измерения тока катушки.Поскольку входное напряжение драйвера может быть значительно выше напряжения катушки, измеренный ток на источнике питания может быть значительно ниже тока катушки (драйвер и катушка по сути действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания слишком велико по сравнению с тем, которое необходимо двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным током. Кроме того, обратите внимание, что ток катушки является функцией установленного предела тока, но это не обязательноравныйтекущая настройка лимита. Фактический ток через каждую катушку изменяется с каждым микрошагом. Более подробную информацию см. в техническом описании DRV8834.
Принципиальная схема
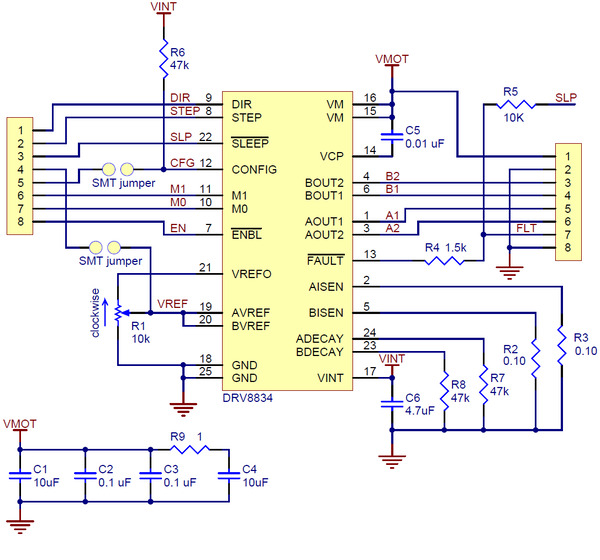 |
| Принципиальная схема драйвера низковольтного шагового двигателя DRV8834. |
|---|
Эта схема также доступна для скачивания в формате PDF (105k pdf).
Основные различия между DRV8834 и A4988
Плата DRV8834 была разработана таким образом, чтобы быть максимально похожей на наши платы драйверов шаговых двигателей A4988, и ее можно использовать в качестве замены для платы A4988 во многих приложениях, поскольку она имеет тот же размер, схему расположения выводов и общий интерфейс управления. Однако между этими двумя модулями есть несколько различий, на которые следует обратить внимание:
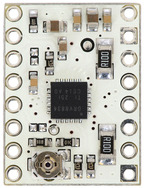 |
| Плата драйвера низковольтного шагового двигателя DRV8834. |
|---|
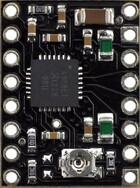 |
| Держатель драйвера шагового двигателя A4988, Black Edition |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется как DRV8834’sВИНАвыход, поскольку DRV8834 не требует логического питания (а A4988 не имеет выхода неисправности). Обратите внимание, что подключение безопасноВИНАвывод напрямую к логическому питанию (между выходом ИС и выводом имеется резистор сопротивлением 1,5 кОм для его защиты), поэтому модуль DRV8834 можно использовать в системах, разработанных для A4988, которые направляют логическое питание на этот вывод.
- TheСПАТЬконтакт на DRV8834 не подтянут по умолчанию, как на A4988, но несущая плата подключает его кВИНАконтакт через резистор 10 кОм. Таким образом, системы, предназначенные для A4988, которые направляют логическое питание наВИНАштифт будет эффективно иметь подтягивание 10k наСПАТЬприколоть.
- Потенциометр ограничения тока находится в другом месте.
- Соотношение между настройкой ограничения тока и опорным напряжением на выводе различно.
- DRV8834 обеспечивает микрошаг 1/32; A4988 понижает частоту только до 1/16 шага.
- DRV8834 имеет только два контакта для установки режима микрошага; у A4988 их три. Таблица выбора шага различается для DRV8834 и A4988 для всех разрешений микрошага, кроме полношагового и полушагового режимов. На DRV8834 вывод M0 необходимо оставить в плавающем (высокоимпедансном) состоянии для выбора некоторых режимов микрошага. Режим микрошага по умолчанию на DRV8834 — 1/4 шага, а режим микрошага по умолчанию на A4988 — полный шаг.
- DRV8834 не имеетПЕРЕЗАГРУЗИТЬвход.
- Контакты на носителе DRV8834, соответствующие MS3 и носителе A4988ПЕРЕЗАГРУЗИТЬПо умолчанию контакты отключены. Если электрическая совместимость с носителем A4988 не имеет значения, два разных сигнала (CONFIG и VREF) на носителе DRV8834 можно подключить к этим контактам с помощью перемычек для поверхностного монтажа (описанных в разделе «Дополнительные перемычки для контактов» выше).
- Требования к минимальной длительности импульса на выводе STEP для двух драйверов различны. В случае DRV8834 длительность импульсов STEP высокого и низкого уровня должна быть не менее 1,9 мкс; при использовании A4988 они могут быть короче 1 мкс.
- DRV8834 поддерживает более низкие напряжения питания, чем A4988, но его максимальное напряжение питания также ниже (2,5–10,8 В против 8–35 В).
- DRV8834 может выдавать больший ток, чем A4988, без дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8834 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального носителя A4988).
- DRV8834 использует другую систему наименований для выходов шагового двигателя, но функционально они такие же, как соответствующие контакты на носителе A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя. На обеих платах первая часть этикетки идентифицирует катушку (так, на DRV8834 есть катушки “A” и “B”, а на A4988 — катушки “1” и “2”).
- Для приложений, чувствительных к цвету, следует учитывать, что носитель DRV8834 белого цвета.
Подводя итог, можно сказать, что плата DRV8834 достаточно похожа на наши платы A4988, поэтому минимальная схема подключения для A4988 также является допустимым альтернативным способом подключения DRV8834 к микроконтроллеру:
 |
| Альтернативная минимальная схема подключения микроконтроллера к плате драйвера шагового двигателя DRV8834 (режим 1/4 шага). |
|---|
| Основные атрибуты | |
|---|---|
| Тип | Модуль |
| Пользовательские характеристики | |
| Выходной ток | 2А |
| Количество каналов | 2 |
| Напряжение питания до | 10,8 В |
| Напряжение питания от | 2,5 В |
- Цена: 958 ₴