



Драйвер шагового двигателя RepRap A4988 - красный
501 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: 993356760
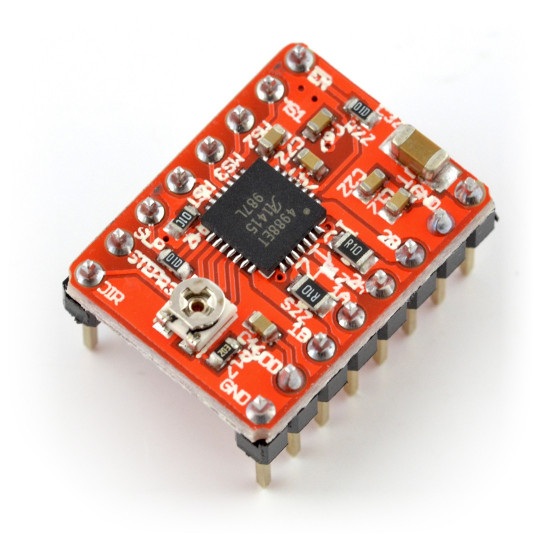
Описание товара: Драйвер шагового двигателя RepRap A4988 - красный
Система с контроллером A4988, предназначенная для 3D-принтеров, позволяет управлять шаговым двигателем с активным ограничением максимального тока.
Подключение контроллера
Для поворота двигателя на один шаг необходимо подать высокий уровень (логическую единицу) на вывод STEP; следующая последовательность нулей и единиц переместит двигатель на следующий шаг и т. д. Направление выбирается путем подачи соответствующего состояния на вывод DIR (например, низкий уровень — вращение по часовой стрелке, низкий уровень — вращение против часовой стрелки). Контроллер также позволяет выбирать разрешение работы двигателя.
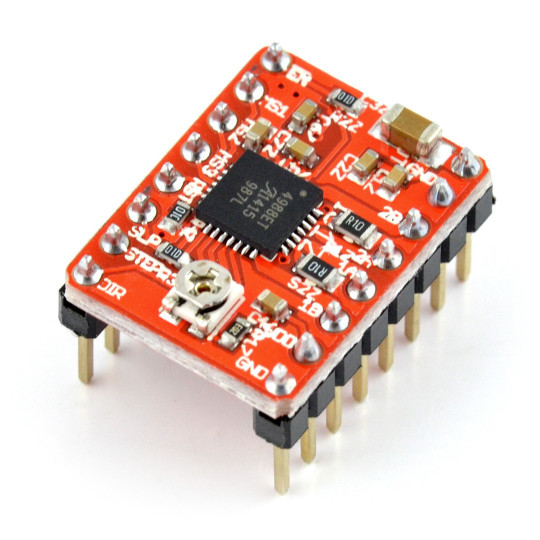
Несмотря на невысокое качество печати и паяльной маски, контроллер сохраняет свою полную функциональность. Мы также предлагаем высококачественный модуль A4988 от Pololu. |
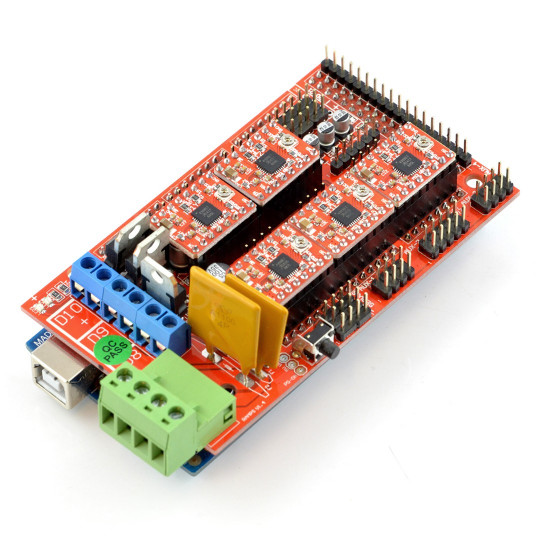
Контроллер Ramps 1.4 с модулем Arduino Mega 2560 и драйверами A4988 подключен.
Драйвер шагового двигателя.
теплоотвода контроллера
Плата рассчитана на рассеивание тепла при потреблении тока приблизительно 1 А на катушку. Если потребление тока значительно выше, следует использовать внешний радиатор, который можно закрепить с помощью теплопроводящего клея.
Источник питания
Для питания логической части модуля требуется напряжение в диапазоне от 3 В до 5,5 В, которое должно подаваться на соответствующий вывод. ВДДНа вывод подается напряжение питания двигателя в диапазоне от 8 В до 35 В. ВМОТ.
Система может управлять двигателями с номинальным напряжением ниже требуемых 8 В. Для этого необходимо ограничить максимальный потребляемый ток с помощью потенциометра, чтобы он не превышал допустимый ток двигателя. Например, для двигателя с сопротивлением обмотки 5 Ом и потребляемым током 1 А номинальное напряжение питания составляет 5 В. При подаче напряжения 12 В ток следует ограничить так, чтобы он не превышал 1 А.
Внимание! Подключение и отключение двигателя при включенном контроллере может повредить систему. |
Разрешение
Шаг выбора определяется с помощью входных данных.МС1,МС2,МС3Возможные настройки показаны в таблице ниже. Входы MS1, MS2 и MS3 имеют внутренний подтягивающий резистор (100 кОм).
Один импульс, подаваемый на вывод STEP, заставляет двигатель переместиться на один шаг в направлении, выбранном путем подачи соответствующего логического состояния на вывод DIR. Выводы STEP и DIR не имеют внутренней подтяжки. Если двигатель должен вращаться только в одном направлении, вывод DIR может быть постоянно подключен к VCC или GND.
Система также имеет три входа для управления энергопотреблением: RESET, SLP и EN; их описание можно найти в документации. Обратите внимание, что вывод RESET ни к чему не подтянут. Если он не используется, его можно подключить к соседнему выводу SLEEP.
| МС1 | МС2 | МС3 | Разрешение |
| короткий | короткий | короткий | Полный шаг |
| высокий | короткий | короткий | 1/2 шага |
| короткий | высокий | короткий | 1/4 шага |
| высокий | высокий | короткий | шаг 1/8 |
| высокий | высокий | высокий | шаг 1/16 |
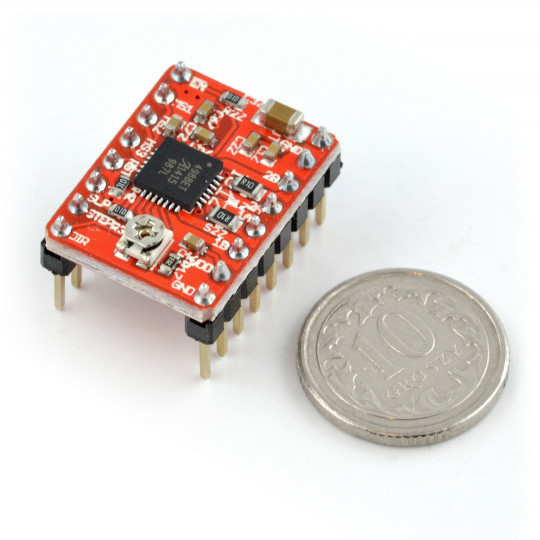
Возможность регулировки потребляемого двигателем тока с помощью потенциометра.
Ограничение тока драйвера
Система может управлять двигателями с номинальным напряжением ниже требуемых 8 В. Для этого используется потенциометр для ограничения максимального потребляемого тока, чтобы он не превышал допустимый ток двигателя. Например, для двигателя с сопротивлением обмотки 5 Ом и потребляемым током 1 А номинальное напряжение питания составляет 5 В. При питании от источника 12 В ток следует ограничивать так, чтобы он не превышал 1 А.
Технические характеристики драйвера шагового двигателя
- Напряжение питания двигателя: 8–35 В
- Ток: максимум 1 А на катушку
- Напряжение питания логической части: 3 В - 5,5 В
- Простой интерфейс управления
- Работает в 5 различных режимах: полный шаг, 1/2, 1/4, 1/8 и 1/16 шага.
- Возможность регулировки потребляемого двигателем тока с помощью потенциометра.
- Паяные позолоченные разъемы
| Пользовательские характеристики | |
|---|---|
| Тест | 3 |
| Вес упаковки | 0,004 кг |
| Высота упаковки | 6 см |
| глубина упаковки | 2 см |
| Ширина упаковки | 5,5 см |
- Цена: 501 ₴