





A4988 - RepRap 35V / 2A драйвер шагового двигателя - Pololu 1182
887 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: 1215411140
Описание продукта: Pololu A4988 - драйвер шагового двигателя RepRap 35 В / 2 A
Система позволяет управлять шаговым двигателем с помощью устройства, которое позволяет создавать логические состояния, такие какArduino , STM32Discovery , Raspberry Piилилюбой микроконтроллер. Модуль Pololu очень прост в использовании. Чтобы повернуть двигатель на один шаг, введите высокий уровень на пин STEP (логическая единица), следующая последовательность нулей и единиц перемещает двигатель на один шаг, и так далее. (высокий уровень - противоположное состояние). Контроллер также имеет возможность выбора разрешения работы двигателя. Шаговый контроллер A4988 - Arduino и Raspberry Pi - идеальная комбинация для управления шаговым двигателем.
Подключение блока управления
Для управления биполярным шаговым двигателем подключите систему, как показано на следующем рисунке. Если вы управляете однополярным двигателем, обратитесь к руководству . Если номинальное напряжение двигателя ниже, чем требуемое питание контроллера (8 В), ограничение тока должно быть установлено вручную с помощью потенциометра.

A. Питание логики, B. Питание двигателя, C. Микроконтроллер.
На рисунке показано минимальное подключение контроллера. По умолчанию вывод RESET не подключен, для запуска системы он должен быть установлен на высокий уровень. Это можно сделать, подключив его к соседнему выводу SLEEP..
мощность
Для питания логической части модуля требуется напряжение в диапазоне от 3 В до 5,5 В, которое должно быть подключено к контакту VDD . На вывод подается напряжение питания двигателя в диапазоне от 8 В до 35 В. VMOT .Система может приводить в действие двигатели с номинальным напряжением ниже требуемого 8 В. Для этого максимальный ток потребления должен быть ограничен потенциометром так, чтобы не превышать допустимый ток двигателя. Пример: Для двигателя с сопротивлением 5 Ом на катушку и потребляемым током 1 А номинальное напряжение питания составляет 5 В. При питании 12 В ток должен быть ограничен так, чтобы он не превышал 1 А.
Прочие вводимые данные
Импульс, поданный на вывод STEP, заставляет двигатель шагать в выбранном направлении, подавая на вывод DIR соответствующее логическое состояние. Выводы STEP и DIR не подтягиваются. Если двигатель должен вращаться только в одном направлении, вывод DIR может быть постоянно подключен к VCC или GND.
Система имеет еще три входа для управления энергопотреблением: RESET SLP и EN - их описание можно найти в документации . Обратите внимание, что вывод RESET никуда не спрятан. Когда он не используется, его можно подключить к соседнему выводу SLEEP.
Рассеивание тепла
Печатная плата рассчитана на рассеивание тепла при потребляемом токе около 1 А на катушку. Если ток намного выше, необходимо использовать внешний теплоотвод, для монтажа можно использовать теплопроводящий клей.
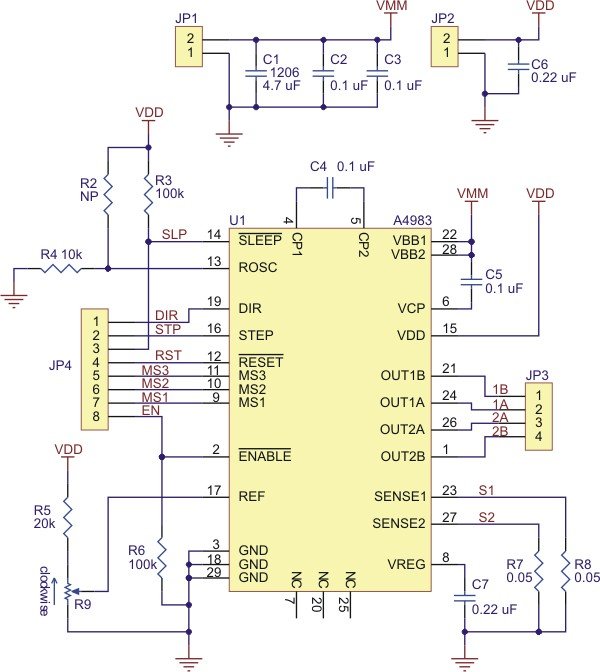
A4498 - диаграмма
Система содержит необходимые пассивные компоненты для правильной работыКонтроллеры. Схема подключения показана справа.
Предупреждение. Подключение и отключение двигателя при включенном блоке управления может повредить систему. |
разрешение
Размер шага определяется входными даннымиMS1,MS2,MS3 выбран. Возможные настройки перечислены в следующей таблице. Входы MS1, MS2 и MS3 имеют внутренний подтягивающий резистор (100 кОм).
| MS1 | MS2 | MS3 | разрешение |
| низкий | низкий | низкий | Полный шаг |
| высокая | низкий | низкий | 1/2 шага |
| низкий | высокая | низкий | 1/4 шага |
| высокая | высокая | низкий | 1/8 шага |
| высокая | высокая | высокая | шаг 1/16 |
A4988 Технические характеристики драйвера:
- Напряжение питания двигателя: 8 В - 35 В
- Ток: макс. 1 A на катушку (с охлаждением до 2 A)
- Напряжение питания логической части: 3 В - 5,5 В
- Простой интерфейс управления
- Работа в 5 различных режимах: полный шаг, 1/2, 1/4, 1/8 и 1/16 шага
- Возможность регулировать ток, потребляемый двигателем, с помощью потенциометра
- Защита от перегрева системы
- Модуль полностью совместим с предшественником: A4983
Набор содержит:
- Модуль с драйвером шагового двигателя A4988
- Золотая полоса - 1х16
A4988 - Управление - Ограничение тока
Система может приводить в действие двигатели с номинальным напряжением ниже требуемого 8 В. Для этого максимальный ток потребления должен быть ограничен потенциометром так, чтобы не превышать допустимый ток двигателя. Пример: Для двигателя с сопротивлением 5 Ом на катушку и потребляемым током 1 А номинальное напряжение питания составляет 5 В. При питании 12 В ток должен быть ограничен так, чтобы он не превышал 1 А.
Шаговый контроллер A4988 позволяет активно ограничивать ток с помощью потенциометра. Одним из способов введения ограничения является установка контроллера в режим полного шага и измерение тока, протекающего через одну катушку без подачи сигнала на вход STEP. Измеренный ток составляет 70 % от установленного предела (обе катушки всегда включены и ограничены 70 % в режиме полного шага). Другая возможность - измерить напряжение на выводе REF (отмеченном кружком на плате) и рассчитать предел тока (измерительные резисторы имеют значение 0,05 Ом). Более подробную информацию можно найти в документации к микросхеме A4988.
| Piotr | |
| отлично | |
| Товар соответствует описанию. Быстрая обработка заказа. Рекомендую. | |
| Piotr | |
| отлично | |
| всё работает | |
| Tomasz | |
| отлично | |
| Супер. | |
| eugeniusz s. | |
| отлично | |
| ХОРОШО | |
| Marcin P. | |
| отлично | |
| ХОРОШО | |
| Tomasz L. | |
| отлично | |
| Я еще не использовал его, но я собрал на его основе контроллер фокусера астрономического телескопа. Он отлично работает. | |
| Andrzej D. | |
| отлично | |
| Хорошо, что вы можете сами припаять контакты. Например, при опущенном потенциометре ... | |
| Grzegorz B. | |
| хорошо | |
| Очень хороший модуль. Единственный недостаток - защита от обратной полярности модуля. | |
| Andrzej D. | |
| отлично | |
| Неограниченный | |
| Ernest S. | |
| отлично | |
| Цена высокая, но и качество тоже. | |
| Основные атрибуты | |
|---|---|
| Производитель | Arduino |
- Цена: 887 ₴